
Use the power of geometric constraints within parametric CAD software to turbocharge development of synthesizing mechanisms.
Dr. Jody Muelaner, PhD CEng MIMechE, Muelaner Engineering Ltd
Many CAD programs provide tools for analyzing and refining mechanisms. However, these assume that you already have an initial design. Classic graphical methods of synthesizing mechanisms provide methods of determining link lengths and joint positions to produce a particular motion.
These methods can be turbocharged using the power of geometric constraints within parametric CAD software. Taking this approach, it is also often possible to synthesize a mechanism to meet a particular design intent using a first-principles approach, without any knowledge of the traditional graphical methods.
Whether adapting traditional graphical methods or taking a first principles approach, mechanism synthesis within CAD software uses the built-in geometric constraint solver. This is the tool at the heart of the sketching functionality within any parametric CAD program such as SolidWorks, CATIA or Inventor. When you draw a line, set it to be perpendicular, equal length and so forth, and then watch it snap into position, a geometric constraint solver is performing the calculations to determine its position in the background. Fundamentally, this involves solving a set of simultaneous equations. Creative use of sketching tools can, therefore, provide a highly intuitive way of leveraging the powerful mathematical solvers to determine the precise link lengths joint positions required for a mechanism to move through some specified positions or orientations.
The generic methodology used to synthesize any mechanism, using the geometric constrain solver, is the same regardless of whether it is applied to traditional graphical methods or a first principles approach. It involves the following steps:
- Sketch a link in a number of positions or orientations describing the required motion
- Sketch an approximate mechanism at each of these positions, with the unknown joint positions and link lengths unconstrained.
- Set the grounded joints to be coincident for each position.
- Set the link lengths to be equal for each position.
- Allow the geometric constraint solver to determine link lengths and grounded joint positions that satisfy these constraints.
- Constrain any remaining unconstrained degrees of freedom in the model to create an optimal mechanism.
Fundamental theory of mechanism design
Most mechanism design involves rigid body kinematics, with the assumption that each link is a rigid body that cannot bend. In three-dimensional space, a rigid body has 6 degrees of freedom (DOF): translation in x, y, and z; and rotation about each one of these axes. However, most of the time mechanisms are designed in 2D, even apparently 3D mechanisms are often simply the combination of these planar 2D mechanisms. In this case, the motion of each link is constrained to a single plane and has 3 DOF: translation in x and y; and rotation in the plane of motion. If a 4-bar planar linkage, which is made up of four rigid bodies, had no joints joining the links together it would have 12 DOF, but this would not be a mechanism, it would simply be a collection of parts.
When links are connected together by joints a mechanism is formed. There are three types of kinematic joint possible for a 2D planar mechanism, these are a pin joint, a full sliding joint which acts like a piston, or a half slider which acts like a pin in the slot. A pin joint removes 2-DOF (both translations), full slider also removes 2-DOF (a translation and a rotation), and half slider removes 1-DOF (a translation). Because mechanism synthesis is not concerned with the motion of the whole mechanism through space, one link is considered to be grounded and acts as a reference frame about which motion takes place, it, therefore, has no degrees of freedom. Gruebler’s equation gives the degrees of freedom for a mechanism:
![]()
where L is the number of links (including ground),
JP is the number of pin joints,
JFS is the number of full sliding joints
JHS is the number of half sliding joints.
Most mechanisms require one degree of freedom, constraining motion to a single dimension moving backward and forwards along a known path. If structure has exactly zero degrees of freedom then it is known as a truss, while structures with negative degrees of freedom can be seen to be statically indeterminate or preloaded. Gruebler’s equation can provide a useful check for complex mechanisms that it is not entirely reliable as Gruebler’s paradox can result in certain mechanisms having more degrees of freedom than the equation suggests.
Types of mechanism synthesis
Mechanism synthesis is often categorized according to its aims into:
- Path generation moves a single point through a prescribed path.
- Motion generation moves a line through a number of prescribed positions.
- Function generation attempts to map an input function to an output function. This is something of a catchall for any problem which isn’t a simple path or motion generation.
Transmission angles and toggles
Transmission angles are a way of quantifying how freely a mechanism can move and whether it will lock, or ‘toggle’ into a particular position. The transmission angle gives the angle between two links, one of which is applying force to the other through a joint which connects them. If the force applied by the first link acts in the direction that the joined point on the second link is traveling, then all of the force is applied to moving the second leg. If the force acts perpendicular to the direction of possible motion then there will be no component of force to produce a motion and the mechanism will lock. Although this provides a first principles explanation, transmission angle is not defined quite like this.
In a 4-bar linkage the four links are conventionally labeled according to where the force is applied:
- Ground link: The fixed point of reference to which stationary joints are fixed.
- Driver: The link to which force is applied, causing it to rotate about the ground link. Also known as the input link or, for certain types of linkage, the crank
- Output link: The other link which rotates about a fixed point on the ground, due to forces transferred through the other links.
- Coupler: The linkage which connects the moving ends of the driver and output links.

In this case, the transmission angle is defined as the acute angle between the coupler and the output link. A transmission angle of 90 degrees means that all of the force transferred by the coupler is applied as a moment to rotate the output link about the ground link. When the transmission angle is zero, all of the force is transferred directly through the grounded joint at the other end of the output link, there is no resulting moment to cause movement of the output link and the mechanism does not move. This is called a toggle position.
If free movement is required, small transmission angles should be avoided. The minimum value for a particular mechanism will depend on the force being applied, frictional forces and accelerations. Generally, transmission angles below 30 degrees should be avoided.
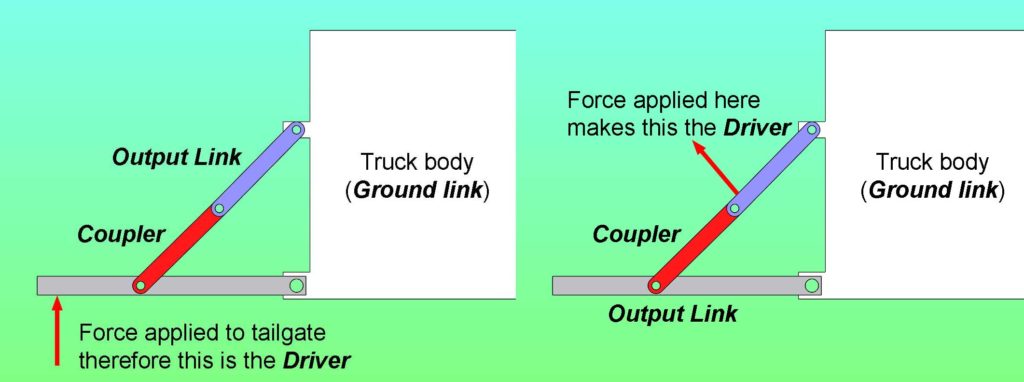
Free movement is not always the aim of mechanism design. Often, mechanisms are deliberately designed to lock, or toggle, in a particular position. For example, a shelf which locks in its open position, such as the tailgate of a truck. When the shelf is lowered it reaches a toggle position so that it cannot be lifted back up again, as shown below. When force is applied to the tailgate, in its open position, the force is transferred through the coupler into the output link with a zero-transmission angle because the coupler and output link are in line with each other. The tailgate will be closed if a force is applied to one of the aligned links. If the force is applied to the upper link, as shown below, the coupler acts with a transmission angle of 45 degrees, allowing the tailgate to close.
When using geometric constraint-based sketching within CAD software, constraints can be added to limit or define transmission angles at specified positions.
CAD based mechanism design
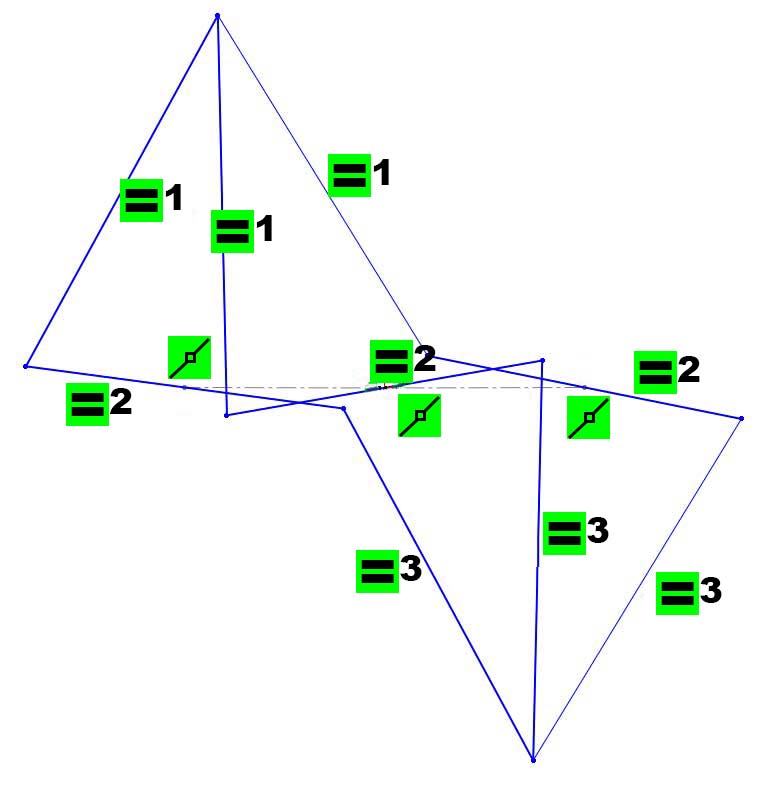
The process of synthesizing a mechanism using geometric constraint based sketching is best understood with a simple example. Consider the design of a compact mechanism to produce a motion path 100 mm long with a radius of approximately 10 m. This can be achieved using a 4-bar linkage. The first step is to sketch the 4-bar linkage mechanism in three approximate positions, each constrained to a point on the motion path, which may conveniently be located in another reference sketch. The point on the ‘floating link’ which actually follows the motion path is known as the ‘coupler point.’ For simplicity the midpoint of the floating link has been used as the coupler point in this example. For more complex motions the coupler point may be easily offset from the axis of the floating link by creating a triangle instead of a single line to represent the floating link. If you do this just make sure to use make each side of the triangle the same length in each position. Each of the three moving linkages is then constrained so that it is of equal length in each position.
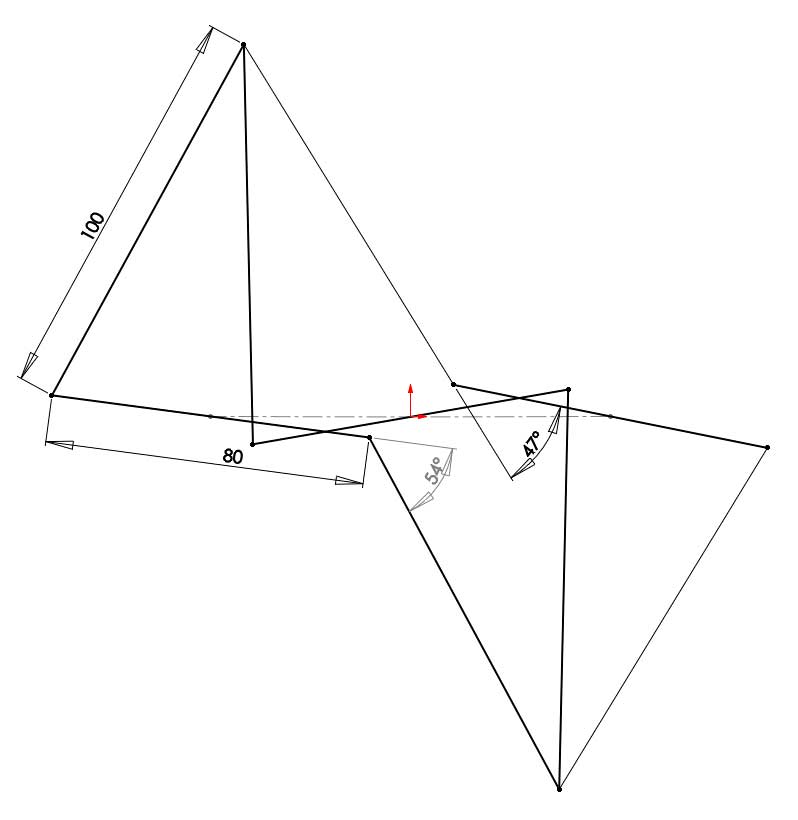
By simply adding equal to constraints, the CAD software has automatically generated a mechanism that will pass through the defined positions. The sketch is not fully constrained at this stage. Different link lengths or joint positions could be used to satisfy the constraints. It, therefore, makes sense to add additional dimensions to constrain the mechanism in a way that fits the design intent. Since the aim was for a compact mechanism, the link lengths are important. It is also intended to produce a motion and so small transmission angles should be avoided. The fully defined mechanism synthesis sketch is shown below.
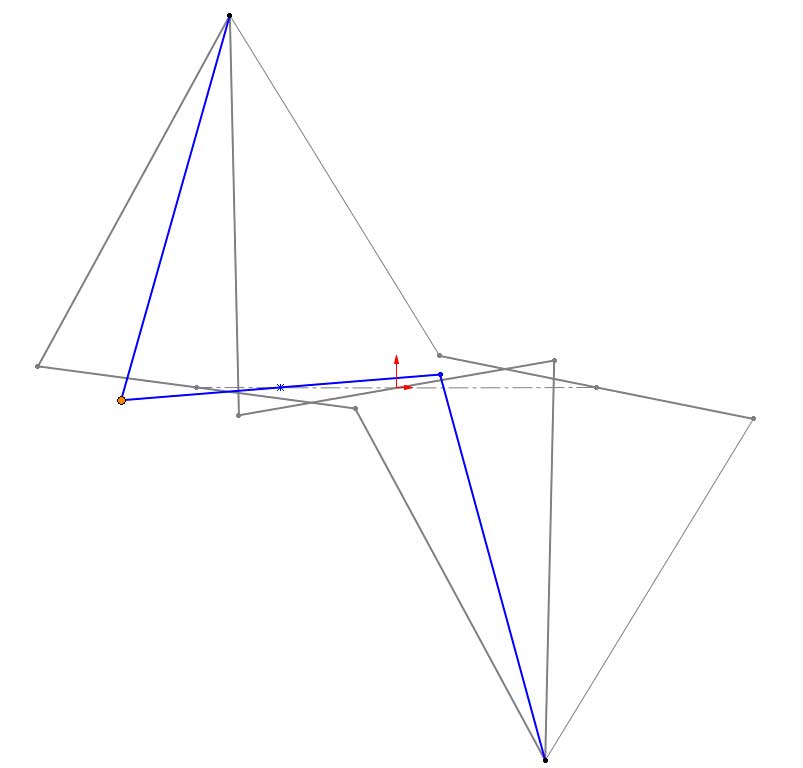
It is important to validate the mechanism. In a separate sketch the mechanism is sketched again, using the same ground joint positions and link lengths but without constraining it to any point on the motion path. This can then be dragged through the range of motion to validate that it functions as intended.
This is only a simple example but with some thought, the method can be applied to solve complex mechanism synthesis problems involving both planar and 3D mechanisms.
Leave a Reply
You must be logged in to post a comment.